💬 Problématique : Comment programmer le mBot pour naviguer
dans un parcours avec des intersections et s'arrêter à la fin ?
Les codes de statut de ligne
| Code | Sondes actives | Situation |
|---|
| (0) 0000 | Aucune | Tout blanc — fin de piste |
| (14) 1110 | L1 + L2 + R1 | Virage gauche / branche gauche |
| (15) 1111 | Toutes | Croisement en T ou en + |
| (1) 0001 | Seule R2 | Virage droite fort |
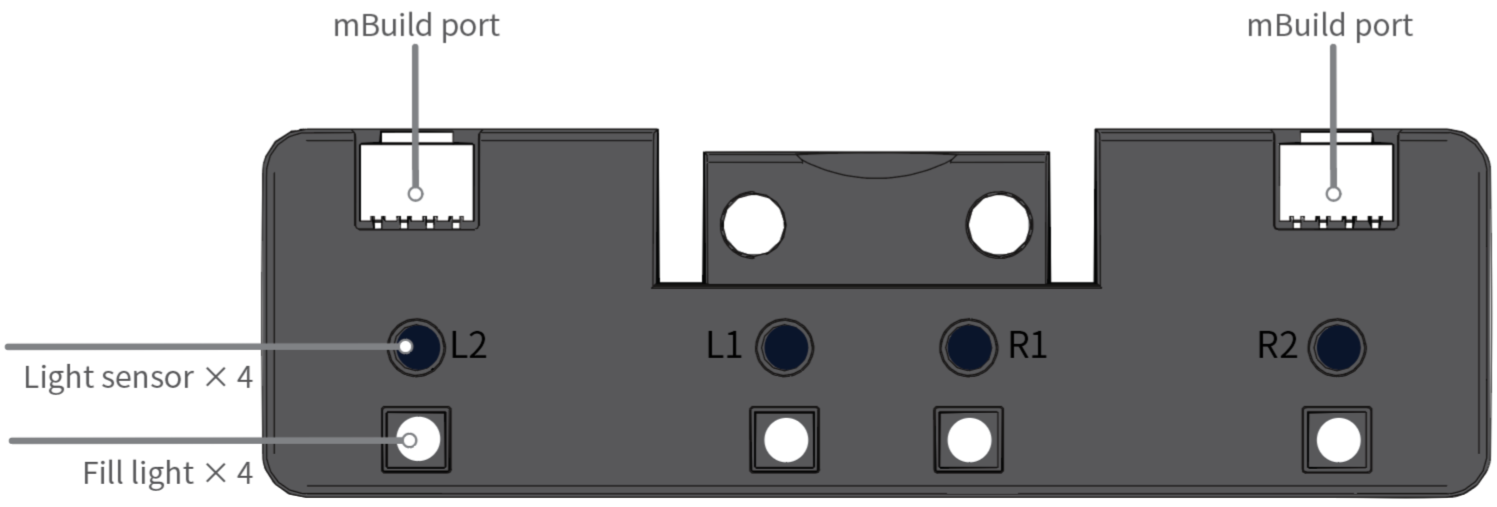
Chaque bit correspond à une sonde (L1 L2 R1 R2).
1 = sonde sur du noir, 0 = sur du blanc.
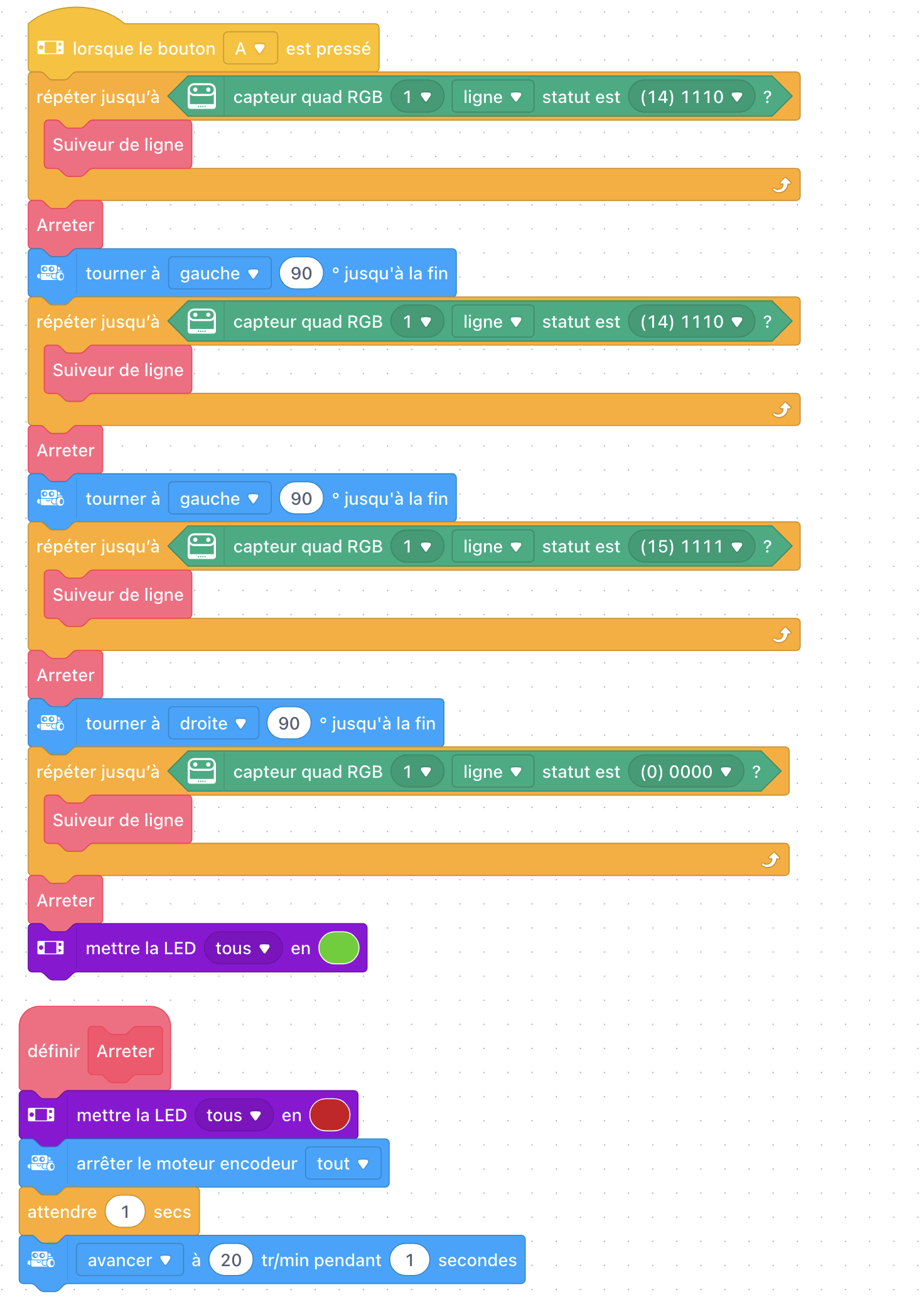
Séquence du parcours de référence
RJ statut = (14) 1110 → Suiveur → Arreter() → tourner gauche 90°
RJ statut = (14) 1110 → Suiveur → Arreter() → tourner gauche 90°
RJ statut = (15) 1111 → Suiveur → Arreter() → tourner droite 90°
RJ statut = (0) 0000 → Suiveur → Arreter() → LED verte 🟢
RJ = Répéter jusqu'à
💡 Fonction Arreter() :
LED rouge → stopper les moteurs → attendre 1 s →
avancer 1 s à petite vitesse (pour franchir le croisement).
⚠️ Parcours fixe : Ce programme suit une séquence précise
(gauche, gauche, droite). Adaptez l'ordre selon votre propre piste.